Опис руху, оснований на рівнянні руху
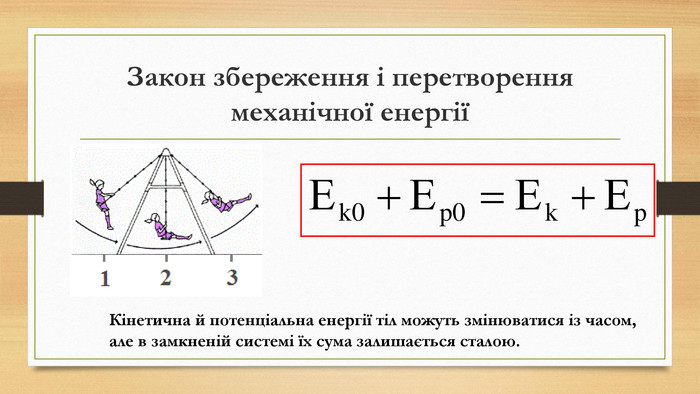
Опис руху, оснований на законі збереження енергії
Зміщення перігелію Меркурія
При розгляді руху матеріальної точки у центральному поля можливі два підходи. Перший базується на другому законі Ньютону - законі руху матеріальної точки, другий - на законі збереження енергії. Розглянемо обидва ці підходи.
Опис руху, оснований на рівнянні руху
Розглянемо рух
матеріальної точки мамою m у полі нерухомо
ї маси M, яка знаходиться у початку координат. Сила взаємодії цих мас визначається
закон всесвітнього тяжіння Ньютона
F = - G m M r / r3.
Рівняння руху матеріальної точки буде таким
m (d2r/dt2) = F.
У декартових координатах радіус-вектор,
швидкість, сила і імпульс мають вигляд
r = i x + j y + k z,
v = i vx + j vy + k vz,
F
= i Fx + j Fy + k Fz,
де
Fx = - G m M x / r3,
Fy = - G m M y / r3,
Fz = - G m M z / r3,
P
= i Px + j Py + k Pz,
де
Px = m vx,
Py = m vy,
Pz = m vz..
Між силою і імпульсом, за означенням, існує наступний
звйазок
Fx = dPx/dt,
Fy = dPy/dt,
Fz = dPz/dt.
Оскільки сила завжди при русі у центральному полі
спрямована до початку координат, тобто паралельна радіус-вектору, то момент
такої сили дорівнює нулю
[r × F] =
[r × dP/dt] = 0.
Цей вираз можна записати так
[r × dP/dt] = d[r × P]/dt - [dr/dt × P] = 0.
У другому доданку ми маємо векторний добуток двох
паралельних векторів – швидкості і імпульсу, тому він дорівнює нулі.
Залишається рівняння, що містить похідну моменту імпульсу, отже сам момент
імпульсу є сталою величиною, тобто ми маємо закон збереження моменту імпульсу
матеріальної точки
[r × P] = const.
Можна зробити і ще сильніший висновок: не лише повний
момент імпульсу матеріальної точки є сталою величиною, але і кожна його
проекція також. Дійсно, умову рівності нулю моменту імпульсу сили можна
записати так
[r×F] = i (y Fz – z Fy) - j (x Fz – z Fx) + k (x Fy – y Fx) =
= i γ (y z – z y) - j γ (x z – z x) + k γ (x y – y x)
= 0.
Тут γ=-G m M/r3.
Тобто нулю дорівнює не лише повний момент сили, але і всі його декартові
компоненти. Відповідно, зберігатиметься не лише повний момент імпульсу
матеріальної точки, але і кожна його декартова складова. Оскільки
[r×P] = i m [y (dz/dt) – z (dy/dt)] - j m [x (dz/dt) – z (dx/dt)] + k m [x (dy/dt) – y (dx/dt)],
То матимемо систему наступних трьох рівнянь
y (dz/dt) – z (dy/dt) = a,
-[x (dz/dt) – z (dx/dt)] = b,
x (dy/dt) – y (dx/dt) = c.
Тут a, b, c – довільні сталі. Якщо перше рівняння помножити на x,
друге на y, третє на z і скласти їх, то матимемо рівняння площини
a x + b y + c z =
0.
Робимо висновок – рух матеріальної точки відбувається у
площині.
Вихідне векторне рівняння руху у загальному вигляді можна
замінити системою трьох скалярних рівнянь
m (d2x/dt2) = - G m M x / r3,
m (d2y/dt2) = - G m M y / r3,
m (d2z/dt2) = - G m M z / r3.
Якщо врахувати зроблений нами вище висновок щодо руху
матеріальної точки, то декартову систему координат можна вибрати так, щоб рух
відбувався у площині xy. Тоді матимемо лише два перших рівняння системи. Їх
зручно записати у полярній системі координат. У попередньому параграфі ми
показали, що тангенціальна і трансверсальна компоненти прискорення мають вигляд
ar = d2r/dt2 – r
(dφ/dt)2,
aφ = (1/r) [d(r2 dφ)/dt].
Для відповідних компонент сили вирази будуть такими
Fr = - G m M/r2, Fφ = 0.
Рівняння з руху матимуть вигляд
m [d2r/dt2 – r (dφ/dt)2]
= - G m M/r2,
m (1/r) [d(r2 dφ)/dt] = 0.
Друге рівняння є законом збереження секторної швидкості
c = r2 (dφ/dt)/2 = const.
З цього закону випливає, що φ=φ(r) або
r=r(φ). Останнє твердження дозволяє похідні за часом у
рівнянні руху замінити похідними за координатами
dr/dt = (dr/dφ) (dφ/dt) =
(2 c/r2) (dr/dφ) =
- 2 c [d(1/r)/dφ],
d2r/dt2 = [d(dr/dt)/dφ] (dφ/dt) = -(4 c2/r2) [d2(1/r)/dφ2].
Рівняння руху тепер набере вигляду
G M/r2 = (4 c2/r2) [d2(1/r)/dφ2] + 4 c2/r3
або
d2(1/r)/dφ2 + 1/r = λ,
де λ=GM/(4c2). Підстановкою u=1/r це рівняння можна суттєво спростити
d2u/dφ2 + u = λ.
Частинний розвйазок неоднорідного рівняння має вигляд
u = λ,
загальний розвйазок однорідного буде таким
u = a cos(φ) + b sin(φ),
де a
i
b – довільні сталі. Загальний
розвйазок неоднорідного рівняння є сумою частинного розвйазку однорідного
рівняння і загального розвйазку однорідного рівняння
u = λ + a cos(φ) + b sin(φ).
Ввівши нові сталі співвідношеннями
a=ρ cos(φ0),
b=ρ sin(φ0)
і повернувшись до старої змінної, отримаємо розвйазок у
такому вигляді
1/r = λ + ρ
cos(φ – φ0),
або
1/r = 1/p + (ε/p) cos(φ – φ0).
Канонічне рівняння кривої другого порядку у полярних
координатах має вигляд
r = p/[1+ε cos(φ - φ0)].
Зокрема,
dr(φ)/dφ = p ε sin(φ - φ0)/[1+ε cos(φ - φ0)]2,
dr(φ)/dt = p ε sin(φ - φ0)/[1+ε cos(φ - φ0)]2
dφ/dt.
Отже, траєкторією матеріальної точки є крива другого
порядку з параметром
p = 1/λ = 4 c2/(G M).
і ексцентриситетом
ε = p ρ.
Якщо ε=0, то маємо коло, якщо 0<ε<1, то має еліпс,
якщо ε=1, то маємо параболу, якщо ε>1, то маємо гіперболу.
Розглянемо це питання детальніше. Дві довільні сталі
загального розвйазку можна спробувати знайти з початкових умов
r(φ0) = r0 = 1/(λ + ρ) = p/(ε + 1),
dr(φ0)/dφ = 0.
Перша початкова умова дає звйазок між двома довільними
сталими. Жодної користі від другої початкової умови немає. Таким чином, наш
розвйазок міститиме одну довільну сталу. Якщо замість наведеної вище другої
початкової умови задати секторну швидкість матеріальної точки c,
для довільних сталих отримаємо наступні вирази
λ=G M/(4 c2),
ρ = 1/r0 – λ =
1/r0 – G M/(4 c2),
або
p = 4c2/(G M),
ε = 4 c2/(r0 G M) – 1.
Таким чином задача розвйазана до кінця, але незручність
такого параметру задачі як секторна швидкість очевидна. Було б значно зручніше,
якби ми виразили параметри орбіти матеріальної точки не через секторну
швидкість, а через абсолютну величину її звичайної швидкості у початковий
момент часу. Так само для аналізу параметрів орбіти було б зручно виористати лише енергетичні характеристики системи типу її потенційної і кінетичної енергій. Для кінетичної
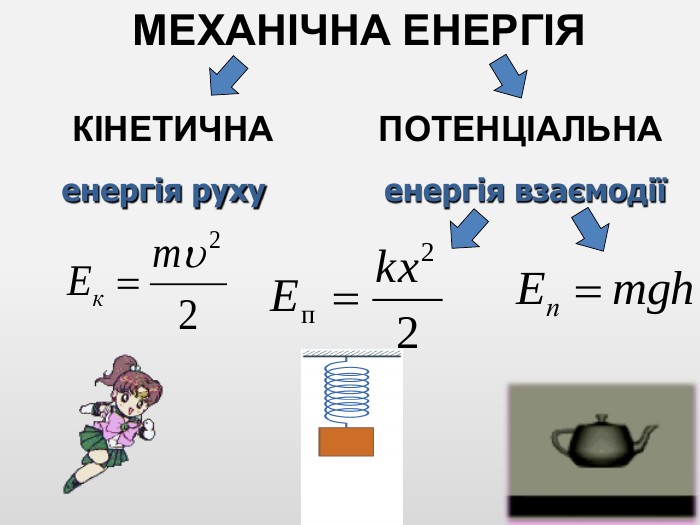
енергії у початковий момент часу візьмемо її нерелятивістський вираз
Ek = m v02.
Для потенційної енергії матеріальної точки у
гравітаційному полі використаємо вираз на основі закону всесвітнього тяжіння
Ep = - G m M/r0.
Сума цих енергій зберігається протягом всього руху
матеріальної точки і у початковий момент дорівнює
E0 = Ep + Ek
У попередньому параграфі ми показали, що у полярній
системі координат квадрат швидкості матеріальної точки визначається так
v2 = vr2 + vφ2,
vr = dr/dt,
vφ = r (dφ/dt) = 2 c/r.
У початковий момент часу
vr(0) = 0,
vφ(0) = 2 c/r0,
v02 = 4 c2/r02.
Звідси
c = r0 v0/2 =.
Тепер параметри траєкторії будуть таким
p = r02 v02/(G
M) = 2 r0 Ek/|Ep|.
ε = r0 v02/(G M) – 1 = 2 Ek/|Ep| -1.
Проаналізуємо отриманий результат. Якщо кінетична енергія
матеріальної точки у початковий момент часу менше половини абсолютної величини потенційної енергії,
то ε<0 і матеріальна точка падає на масу M. Якщо
кінетична енергія матеріальної точки дорівнює половині абсолютної величини потенційної енергії, то ε=0 і орбітою матеріальної точки буде коло. Якщо кінетична енергія більша за половину абсолютної величини потенційної енергії, але менше цілої, то для 0<ε<1 матеріальна точка рухатиметься
за еліптичною орбітою. Якщо кінетична енергія дорівнюватиме абсолютній величині потенційної енергії, то ε=1 і орбітою буде парабола. Якщо кінетична енергія буде більшою за абсолютну величину потенційної енергії, то ε>1 і орбітою буде гіпербола. Важливо, що характер орбіти буде цілком залежати
лише від абсолютної величини швидкості матеріальної точки, а не від її напрямку.
Опис руху, оснований на законі збереження енергії
Закон збереження енергії має вигляд
E0 = Ep + Ek.
Тут
кінетична енергія матеріальної точки
Ek = m v2/2,
потенційна
енергія
Ep = - G m M/r.
Сума цих
енергій зберігається протягом всього руху матеріальної точки. Перевага закону
збереження енергії перед рівнянням руху у тому, що закон збереження енергії є
диференційним рівнянням першого порядку, а закон руху – другого. У закон
збереження енергії входить як радіус-вектор матеріальної точки, так і абсолютна
величина її швидкості. Останню зручно виключити з рівняння. Тоді ми матимемо
звичайно диференційне рівняння щодо радіус-вектору. У полярних координатах
v = er dr/dt + eφ
r dφ/dt.
Перейдемо від
диференціювання за змінною t до диференціювання за змінною φ
v = er (dr/dφ) (dφ/dt) + eφ r dφ/dt.
Похідну за часом
взагалі можна виключити з цього виразу, оскільки для руху матеріальної точки у
центральному полі зберігається її секторна швидкість
c = r2 (dφ/dt).2.
Тепер
v = er 2 c (dr/dφ)/r2 + eφ 2 c/ r.
Квадрат швидкості
тепер буде таким
v2 = 4 c2 (dr/dφ)2/r4 + 4 c2/ r2.
Якщо перейти тепер до
нової змінної u=1/r, то квадрат
швидкості запишеться так
v2 = 4 c2 [(dr/dφ)2 + u2].
Закон збереження енергії тепер набере вигляду
2 m c2 [(dr/dφ)2 + u2] - G m M u = E0
або
(dr/dφ)2 = - u2 + λ u + h
або
dr/dφ = (- u2 + λ u + h)1/2.
Тут λ=G M u/(2 c2), h=E0/(2 m c2). Знак перед коренем квадратним обирається з початкових
умов. У даному разі він не суттєвий, оскільки при фінітному русі розвйазок буде
коливальним – радіус-вектор то зростатиме у залежності від азимутального кута,
то спадатиме. Для визначеності нехай це буде знак мінус. Дане рівняння належить
до рівнянь з відокремлюваними змінними і у диференціалах його можна записати
так
dφ = - du/(- u2 + λ u + h)1/2.
Для
обчислення відповідного інтегралу у правиці рівняння нам потрібно перейти до
нової змінної інтегрування. Для підбору відповідної підстановки спочатку
потрібно знайти корені алгебраїчного рівняння під знаком кореня квадратного
u2 - λ u - h = 0.
Вони
наступні
u1 = λ/2
– (λ2/4 -h)1/2,
u2 = λ/2
+ (λ2/4 -h)1/2.
Нову
змінну інтегрування введемо наступним чином
u = (u1 + u2)/2 + w (u1 - u2)/2.
Тепер
рівняння у диференціалах набере вигляду
dφ = - dw/(1 – w2)1/2.
Інтегруючи
обидва боки рівняння отримуємо
φ = φ0
+ arccos(w).
Початковою
умовою для диференційного рівняння можна взяти умову
φ(0) = φ0
= 0.
Звідси
знаходимо
w
= cos(φ),
u
= λ/2
+ (λ2/4
+ h)1/2 cos(φ),
r
= p/[1 + ε cos(φ)].
Отже, траєкторією
матеріальної точки є крива другого порядку. Тут
p
= 2/λ,
ε
= (1 + 4 h/λ2.
Після простих
алгебраїчних перетворень ми отримаємо вже відомі з попереднього параграфа вирази
p = 2 r0 Ek/|Ep|б
ε = 2 Ek/|Ep|
-1.
Для умов на
поверхні Землі
ε2
= 1 + [v02/(g2 r02)]
(v02 – 2 g r0),
де прискорення
вільного падіння
g
= G M/r02.
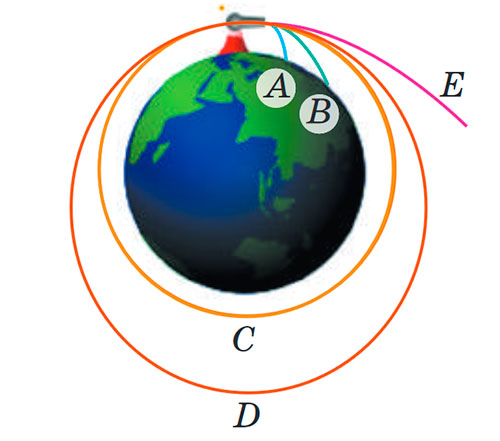
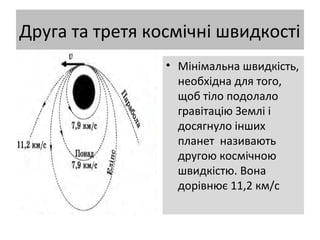
На завершення знайдемо першу і другу
космічні швидкості в умовах Землі. В якості початкового значення радіус-вектора
матеріальної точки візьмемо радіус Землі. Перша космічна швидкість відповідає руху
матеріальної точки круговою орбітою довкола Землі, тобто має бути ε=0. У цьому разі
v0 = (g r0)1/2
= 7800 м/c.
Другій космічній
швидкості відповідає рух за параболічною траєкторією. У цьому разі
v0 = (2 g r0)1/2
= 11000 м/c.
Розглянемо
залежність першої космічної швидкості від відстані до джерела гравітаційного
поля. Запишемо детальний вираз для ексцентриситету матеріальної точки
ε = 2 Ek/|Ep|
-1 = v2 r/(G M)
– 1.
Як вже
зазначалось, руху за колом довкола джерела поля відповідає ε=0. Якщо джерело поля
є точковим, то перша космічна швидкість наступним чином залежатиме від відстані
до центра
v= (G M/r)1/2.
Тобто, чим
меншою є відстань до центра, тим більшою має бути перша космічна швидкість. При
певній відстані rg ця швидкість
досягатиме швидкості світла c. Така відстань до центра поля називається гравітаційним радіусом
джерела поля
rg = G M/c2.
Гравітаційний
радіус для Землі становить 0.44 см. Це означає, що якби всю масу Землі вдалося стиснути
до розмірів кулі з меншим діаметром, ніж 0.44 см, то світловий промінь, випромінюваний
з поверхні такої кулі, не зміг би вийти за межі її гравітаційного радіусу.
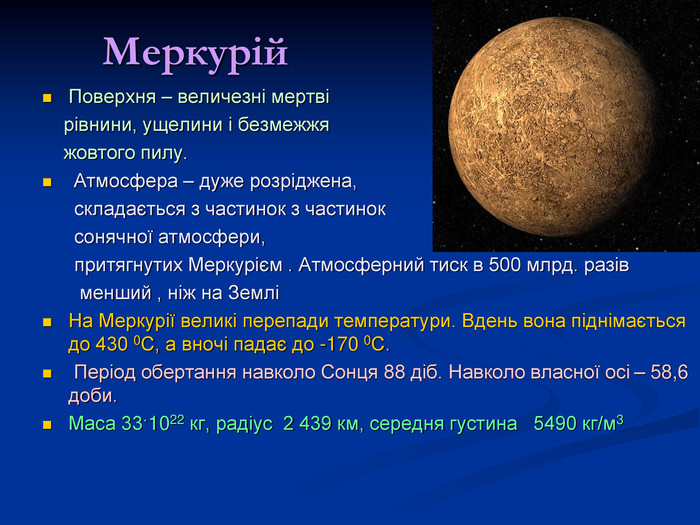
Зміщення
перігелію Меркурія

Викладена вище теорія базувалась на законі всесвітнього
тяжіння Ньютона. Його основою є гравітаційний потенціал точкової маси, що
залежить від відстані як 1/r. Така теорія з високою точністю описує рух планет
сонячної системи, проте є і невеликі відхилення від нього. Так перигелій
Меркурія зміщується на 42 секунди за сто років. Для інших планет сонячної
системи це зміщення також існує, але воно значно менше. У той же час у системі
центра мас він мав би, згідно з викладеною вище теорією, залишатись нерухомим.
Це невелике відхилення від теорії Ньютона не має жодного практичного значення,
але якщо воно існує, то вимагає пояснення. На сьогодні таке пояснення лише
одне: гравітаційний потенціал створюваний Сонцем, що залежить від відстані як 1/r, не
є насправді таким. Причин може бути багато. Це і несферична форма Сонця,
внаслідок обертання Сонця довкола осі, що проходить через його центр, це і
неоднорідність розподілу речовини всередині Сонця, це і релятивістські ефекти,
повйазані з рухом планет з кінцевою швидкістю. І хоча ця швидкість на багато
порядків менша за швидкість світла, вони існують і помітні експериментально. Ці
релятивістські ефекти враховує сучасна релятивістська теорія гравітації, основи
якої закладені Айнштайном. Врахування таких релятивістських ефектів цілком
задовільно описує спостережуване експериментально зміщення перигелію Меркурія.
Точний розвйазок задачі двох тіл в рамках релятивістської теорії гравітації був
знайдений Швартшильдом іу перекладі на мову класичної механіки означає, що до
гравітаційного потенціалу, створюваного Сонцем, 1/r слід
додати ще потенціал 1/r3. До
розгляду руху матеріальної точки у полі з таким сумарним потенціалом ми і
перейдемо.
За
наявності додаткового потенціалу закон збереження енергії запишемо у вигляді
Закон збереження енергії має вигляд
E0 = Ep + ΔEp + Ek.
Тут
кінетична енергія матеріальної точки
Ek = m v2/2,
потенційна
енергія, що відповідає закону Ньютона,
Ep = - G m M/r.
додаткова потенційна енергія
ΔEp = - d` G m M/r3.
Тут d`є надзвичайно малою величиною, що має розмірність квадрату довжини. Зручно перейти до нерозмірного параметра d=d`/r02, де r0 - початкове значення радіус-вектора матеріальної точки. У законі
збереження енергії зручно від змінної час перейти до змінної азимутальний кут,
а також до нерозмірного радіус-вектора r/r0 (дивись попередній параграф). Тепер закон збереження енергії можна записати
як наступне диференційне рівняння
dφ = -
du/(d a u3- u2 + a u + 1-a)1/2/
Тут
u=r0/r,
a = |E0p| / |E0k|,
E0p = - G m M/r0
є початковим значенням потенційної енергії,
E0k = m v02/2
Є початковим значенням кінетичної енергії. Тепер
диференційне рівняння можна записати у вигляді
dφ = - du/(d a u3- u2 + a u + 1 - a)1/2.
Для обчислення інтегралу, що виникає при інтегруванні
диференційного рівняння, нам потрібно знайти корені наступного алгебраїчного
рівняння
d a u3- u2 + a u + 1 - a = d a (u
- u1) (u - u2) (u - u3) = 0.
Це рівняння третього степеню матиме три корені u1, u2, u3. Оскільки
коефіцієнт перед третім степенем величини u є
надзвичайно малим, то перші два корені мало відрізнятимуться від коренів
квадратного рівняння
- u2 + a u + 1 - a = 0,
Коренями останнього рівняння є
u1 = a/2 - (a2/4 + 1 - a)1/2,
u2 = a/2 + (a2/4 + 1 - a)1/2.
Оцінкf третього кореня може бути наступнj.
u3 = 1/(d a).
Які ми вже знайшли у попередньому параграфі, а третій
корінь буде надзвичайно великим і у міру прямування d до нуля, прямуватиме до нескінченості. Загальний розвйазок
диференційного рівняння
φ = φ0 - [1/(d a)1/2] ∫du/[(u - u1) (u - u2) (u - u3)]1/2.
Інтегранду
можна суттєво спростити, якщо скористатись теоремою про середнє
φ = φ0 - [1/(d a (u3 - <u>))1/2] ∫du/[( u1 - u) (u - u2)]1/2.
Формально введене значення середнього невідомої функції
можна легко оцінити, якщо вважати рух матеріальної точки фінітним, а також той
факт, що траєкторія руху матеріальної точки мало відрізняється від кола (для
Меркурія ці факти дійсно мають місце і u1<u<u2).
Тоді
<u> = (u1 + u2)/2 = a,
φ = φ0 - [1/(d a (u3 - <u>))1/2] ∫du/[( u1 - u) (u - u2)]1/2.
Тепер
φ = φ0 - [1/(1 - d a2)1/2] ∫du/[( u1 - u) (u - u2)]1/2,
Інтеграл,
що залишився після спрощення, аналогічний відповідному інтегралу попереднього
параграфа і ми запишемо остаточний інтеграл
u = a/2 + (a2/4 + 1 - a)1/2 cos[(1 - d a2)1/2 (φ -
φ0)].
В якості
початкової умови для диференційного рівняння можна взяти будь-яке значення
азимутального кута, оскільки воно не суттєве, тому візьмемо наступне
φ(0) = φ0.
Тепер
частинний розвйазок рівняння матиме вигляд
u = a/2 + (a2/4 + 1 - a)1/2 cos[(1 - d a2)1/2 φ)]
або
r = p/[1+ε cos(w φ)].
Це є рівняння еліпса, перигелій якого зміщується з
постійною кутовою швидкість проти годинникової стрілки,
p = a/2,
ε = (a2/4 + 1 - a)1/2,
w = (1 - d a2)1/2.
Значення цих параметрів орбіти збігаються зі значеннями, отриманими
у попередньому параграфі, а вираз для кутової швидкості обертання перигелію можна
спростити
(1 - d a2)1/2
= 1 - d a2/2.
Тепер період обертання планети буде не 2π, а 2π+2π/w. Тобто
за кожний період обертання перигелій зміститься на кут
Δφ=d a2/2.
В рамках релятивістської
теорії гравітації коефіцієнт d визначається однозначно і він визначається через гравітаційний
радіус центрального тіла.
Національна асоціація дослідників Голодомору - геноциду українців | Публікація 26Національна асоціація дослідників Голодомору - геноциду українців | Публікація 15
Валерій Швець